
Home | 連絡先・所在地・アクセス | リンク

学校の出来事
★課題研究発表会5(情報システム科3年生)★
投稿日時 : 2022/01/27
 総務課
総務課
今回は、1月27日(木)に行われた情報システム科の課題研究発表会の様子をお知らせします。来年課題研究を履修することになる2年生も聴講しました。
1班は「体感型アトラクションの製作」。オブジェクトツールで人型の型取りを行い、ブレンダーを使って3Dモデルを稼働させてアニメーションを生み出しました。またボーン(骨)を使って物体にジョイント部分をつけて対応、一つ一つ細かい部分まで動かせるようにしました。またキネクト(kinect)というセンサーを搭載させ、人の動きを感知してunityを使って動きをプログラミングしました。
2班は「Unityを使用したゲーム制作」。Unityというソフトを使って建物をマップ化、プログラムを独自に制作しゲームを作ってみました。
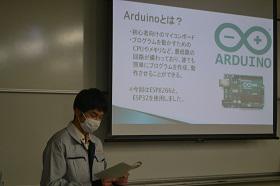
3班は「Arduinoを用いたお掃除ロボットの製作」。Arduinoとは機械工学科のところにも出てきましたが、プログラミングチップでカイロ自体を制御するハードウェア。後ろのスポンジを回してごみを回収、箱もついていてその中にごみを入れることも出来ます。段差や障害物、壁にも対応できるセンサを搭載しています。




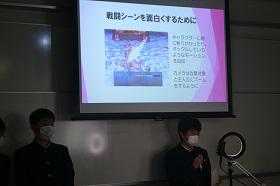
4班は「科学技術高校を舞台としたRPGの制作」。学校の校内配置図を埋め込み本校を地理的に再現したロールプレイングゲームを作りました。製作動機は本校は敷地内がとても広く、校舎の構造も複雑で先生方も生徒も把握しきれない現状を何とかしたいということから研究を始めたそうです。使用したソフトウェアはRPGツクールMV、ドラクエのような対戦型RPGに見られる「ターン制コマンド選択バトル」では飽きが来るのも早いので、現在進行形・リアルタイムでボタンを押した後に起こる出来事を楽しんでもらいたいという創意がなされています。特にカメラワークに熱を入れたようです。

5班は「Minecraftを用いたゲーム制作」。いわゆるブロック積み立てゲーム、コマンドの指示によってブロックを流し込み、主人公はそれを避けてゴールに進んでいきます。「Flame」はその名の通り「炎」、炎を流してダメージを避けて行きます。
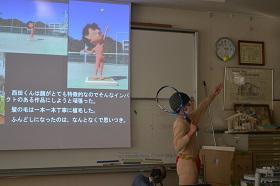
6班は「Unityを用いた3Dインベーダーゲームの制作」。インベーダーゲームと言えばアーケードゲームの定番、もちろん2Dの平面ゲームであるが、それを立体3Dで作ってみようという画期的な意欲研究。
7班は「WordPressを用いた課題研究サイトの制作」。仮想サーバ(ネットワーク上での仮想経由地)上でWordPress(webサイト作成ソフト)を稼働させてカスタマイズ、本校の情報システム科のwebサイトを作成しました。情報システム科に特化したwebサイト作りを目指し、webデザインやどのパソコンからサイトを見てもきちんと見やすいレイアウトを保てる工夫がなされています。質疑応答でも出ましたが、なぜ「仮想サーバ」なのか、実際のサーバを使うとコストがかかってしまうからです。

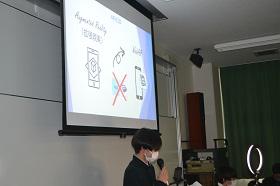
8班は「WebARに関する研究」。名作・ポケモンGoのようにある空間にポケモン(モンスター)がいるかのように出現させる仕組みである拡張現実(AR)や仮想現実(VR)を駆使した研究です。都市基盤工学科のところでも紹介した「フォトロゲイニング」の班との共同研究も行いました。


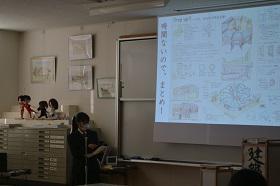
9班は「音声認識を用いた教室案内」。これは原田君による単独研究です。音声認識プログラムを作りだし、しゃべると音声で場所を案内してくれます。例えば本校は大学科「理数科」小学科「理工科」略称「R科」、さまざまな呼び方がありますが事前にプログラミングすることで「理数科」「理工科」「R科」どの音声を発しても同じ場所を認識してくれる利口なシステムに仕上げました。
10班は「次世代サバイバルゲームの制作」。昔懐かしいサバイバルゲームを土台にして、実際にBB弾を使うと危険が伴うため、BB弾を赤外線に変えて体に当てる仕組みにしました。銃の引き金を引くと赤外線が発光され、的に赤外線センサーがあたった回数で競うまさに画期的な次世代ゲームに仕上がりました。
11班は「Live 2Dを用いたアバダーの制作」。アバダーとはキャラクターの投影先を表します。事前にイラストを用意し、Live2Dというアプリを活用、動作の基準を設定し、webカメラで人の動きを感知するように設定、動きを忠実に再現させました。表情も微笑みや瞬き、体の揺れまで再現できる優れモノでした。

皆さんの発表のレベルの高さにびっくりしました。ありがとうございました。
31日には、物質工学科が課題研究を行います。
★課題研究発表会4(ロボット工学科3年生)★
投稿日時 : 2022/01/27
総務課
1月27日(木)にはロボット工学科、建築デザイン科、情報システム科で3年生の課題研究発表会がありました。まずは、ロボット工学科の課題研究発表会の様子をお知らせします。
ロボット工学科は平成24年度の学科改編で「制御工学科」から「ロボット工学科」に変わって、今回の卒業生が第8期生となります。
1班は「自動ごみ箱の製作」。赤外線距離センサーを使い、人が近づくと信号が反応しサブモーターが稼働、ふたが開き、ごみを入れるとフォトトランジスタ・赤外線ダイオードが光軸に触れて反応、ふたが閉まるという高度な仕組みのものです。
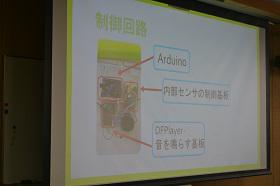
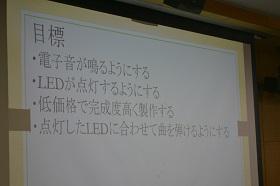
2班は「Arduinoによる電子ピアノ制御」。Arduino(アルドゥイーノ)とは、(ハードウェアの)「Arduinoボード」、および(ソフトウェアの)「Arduino IDE」から構成されるシステムです。アニメ「エバンゲリオン」のテーマ曲「残酷な天使のテーゼ」のリズムに合わせてLEDを光らせて、その光った鍵盤を押していくと曲が演奏できるというハイテクな仕組みです。

3班は「潜水艦・水中ドローン製作」。タイトルを見て驚いた方もいると思いますが、ドローンと言えば空を飛ぶものが一般的ですが、実際に水中ドローンというものがあるのを知った生徒たちはその動作原理に興味を持って実際作ってみようと思った研究です。スクリューやギアボックスを3Dプリンターで出力してみたものの、熱で形がゆがんだり、0.1mmまでの精度がないため、3Dプリンターは大きい物や精度を要するものには使わない方がいいと気付いたことは収穫だったと思います。

4班は「エレベーター自動ドアの製作」。実用化されているものを再現してみたい、実習で学んだ知識を生かしたい、という飽くなき探求心から研究を始めたそうです。自動ドアの機構(機械の構造)製作に時間がかかったそうです。自動ドアの仕組みにバネを用いているのも特色です。
5班は「自動運搬流通システムの研究」。工場の自動化(Factory Automation)が進み、各企業もロボットの開発に力を入れる昨今、その新規ロボット開発がいかに大変なのかを知りたいと思ったきっかけで研究を始めたそうです。自動運搬車やアームロボット、ベルトコンベアの製作を通じてその苦労を実感し、作ったロボットをロボット大会に出場させたそうです。運搬→流通、という一連の動きの自動化で自動運搬流通システムを高度に再現しています。


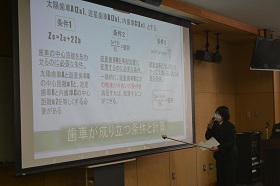
6班は「遊星歯車機構を用いたコーヒーカップの製作」。遊星歯車機構( planetary gear mechanism)とは太陽歯車を中心として、複数の遊星歯車が自転しつつ公転する構造を持った歯車機構です。遊園地にある「コーヒーカップ」の遊具をイメージし、3DCADやレーザー加工機を使って作ってみました。よく「歯車がかみ合わない」などという表現も使いますが、内歯車と外歯車が上手くかみ合うことでその遊星歯車の上に乗せたコーヒーカップがグルグル回っていきます。宇宙の恒星(太陽)と惑星との自転・公転の原理を活用しています。製作には3DCADを活用しました。

7班は「ホバークラフトの製作」。ホバークラフト(hovercraft 別名・エアクッション艇)は、水面や地面に向けて空気を高圧で噴出し、浮揚して進む乗り物で、平坦な面であれば地上、水上、雪原の区別無く進むことができます。簡単な例えで言い換えればゲームセンターなどにある「エアホッケー」の原理だそうです。作りやすさを優先し、形を円型にして自転車のチューブを活用、その上にホバーの本体を乗せました。車体の制御にはラジコンの制御信号を送信する装置・プロポ(プロポーショナルシステム)を活用しました。

8班は「ドローンの研究」。どの科の課題研究でも定番のテーマですが、この班は小型ドローンを製作し、ピッチの角度に研究の力点を置き、角度を変えることによってドローンにどんな動作がなされるかを研究しました。


9班は「モノホイール駆動 車輪型模型の製作」。モノホイール(mono-wheel)とは一輪のタイヤに人が乗り、重心を一定に保って移動できる乗り物です。1輪のタイヤの内側にもう1輪のタイヤを入れて、内輪・外輪の間にベアリングを使って中に鉄球を入れることにより、外輪はまわって内輪はまわらない仕組みを作りだします。自動車学校でも「内輪差」「外輪差」などという言葉を習いますね。

10班は「自動販売機の製作」。外型はアルミフレームを使って作り、コインを入れてボタンを押すとベルトコンベアが稼働し、ジュースを押し出して商品が出てくる仕組みです。PLCという制御装置を活用しています。PLCとはProgrammable Logic Controllerの略で、リレー回路の代替装置として開発された制御装置です。工場などの自動機械の制御に使われるほか、エレベーター、自動ドア、ボイラー、テーマパークの各種アトラクション(遊具)など、身近な機械の制御にも使用されています。
11班は「階段昇降ロボットの製作」。当初はお掃除ロボットを製作する予定でしたが、挫折して階段昇降ロボットに変更したそうです。ステッピングモーターを活用しています。大畑君一人での研究です。
12班は「立体ゾートロープの製作」。ゾートロープとは、回転のぞき絵とも言い、静止画を素早く入れ替えることで、あたかも動いているかのように見せる器具です。円柱の内側にアニメーション、外側に隙間を作り回転させることによって動いているように見える仕組みです。曽根君一人での研究です。
13班は「無線2足歩行ロボット」。サーボモーターを3個活用し、バルス幅をいじると角度が制御され、プログラムを入力するとトワイライト無線機で信号を送り、サーボモーターが稼働、重心移動して前進していく仕組みになっています。この研究も富田君単独研究です。
14班はAIロボット。まさに「ザ・ロボット工学科」とも言える研究。AI(人工知能 Artificial Intelligence)を駆使して、声で動く自動車を製作、制御装置にはラズベリーパイを使いました。音声認識ソフトはジュリアス(Julius)、声を認識し言葉の波形を読み取ることによってそれに応じて動くプログラムを入力しました。また画像認識ソフトはパイソン(Python)を使用、プログラム言語を打ち込んで、今回はじゃんけんの「グー・チョキ・パー」を認識するようにプログラミングし、それぞれ違う信号を送るようにしました。

以上です。
31日(月)には物質工学科が発表会を行います。なお、理数科は2月に2年生が行います。
★課題研究発表会4(建築デザイン科3年生)★
投稿日時 : 2022/01/27
総務課
先週の機械工学科に続いて、1月25日(火)には都市基盤工学科、電気工学科で3年生の課題研究発表会がありました。今回は、1月26日(水)に行われた建築デザイン科の課題研究発表会の様子をお知らせします。建築デザイン科の製図室にて、模型班 CAD班 コンペ班 造形班 検定班 工芸班に分かれて発表を行いました。来年課題研究を履修することになる2年生も聴講しました。
まずは「模型班」の発表。「住宅公園」と「旧清水市立図書館」に分かれての発表がありました。住宅公園は41軒の住宅を作り、それを一体の住宅公園として完成させました。特にこだわったのは芝生でスポンジを利用、如実に再現しました。



図書館は現在の「清水中央図書館」の模型を製作、窓や空間も出来るだけ再現し、屋上の吹き抜け部分も出来るだけ再現するよう努力しました。この図書館は8割が婉曲部分で製作に苦慮したという苦労話も聞けました。


続いて「CAD班」。「有名建築を知ろう」のテーマで研究、旧帝国ホテルの玄関部分の見学報告と作品発表がありました。旧帝国ホテルは今から半世紀ほど前に取り壊され、現在は愛知県の明治村に保管されています。夏休みに実際に明治村まで出向いて目で確認してきました。寸法を調べてCADを使って設計、CAD担当・玄関担当・装飾担当等に役割分担をしながら出来る限りの再現を試みました。


「造形班」は「友達のフィギアを作る」のテーマで作品発表、班員同士、お互いの特徴を捉えた3頭身のデッサンを作りました。サッカーに励む姿、応援指導に打ち込む姿などきちんと友達を観察して製作した跡が見えました。また粘土ウサギも制作しました。お互いのいいところを作品の中におりまぜる工夫がなされていました。



休憩を挟んで続いては「コンペ班」の発表。出品したコンペに分かれて、「建築甲子園」「秋田県立大学コンペ」「個人コンペ」に分かれて発表しました。建築甲子園に出品した作品は奨励賞を受賞しました。秋田県立大学のコンペのテーマは「どうぞの建築」。「どうぞ」という抽象的な言葉からイメージすることを考えるところから始め、そのコンペのコンセプトをとことん突き詰めていった姿を見せてもらいました。2グループが出品しました。その他大学コンペは日本工業大学、国士舘大学、日本大学などへの出品を紹介してくれました。




最後に「木工班」。「技能検定」「ものづくり大会」「ものづくり班」に分かれての発表でした。8月に行われたものづくりコンテストに木造作品を出品したグループ、木造の作品を仕上げたものづくりグループ、「松やにたっぷりの天板の椅子」を仕上げ、大工検定2級を目指したグループ、どこも精力的な姿を見ることが出来ました。
27日には、ロボット工学科・情報システム科・電子工学科が課題研究発表を行います。

★課題研究発表会3(電気工学科3年生)★
投稿日時 : 2022/01/25
総務課
先週の機械工学科に続いて、1月25日(火)には都市基盤工学科、電気工学科で3年生の課題研究発表会がありました。今回は、電気工学科の課題研究発表会の様子をお知らせします。
1班は「太陽光発電を利用したコーナーセンサー」。車を買う時にどのオプションを付けるか悩ましいところ。バックモニターとともにこのコーナーセンサーも人気のオプション。車のコーナーにセンサーを取り付け、車庫入れや切り替えし、左折・右折時に物や人に当たりそうになった時に反応して音で知らせてくれる便利物。至近距離の時には特に大きな音や短い間隔で危険を知らせてくれます。それを太陽光発電を利用して製作しました。
2班は「安全についての研究発表」。電気を学習、そして仕事としていく中で、安全性に関しては切っても切れない関係にあります。安全に電気を扱うための研究を行いました。危険予知活動などを行い、安全に電気を扱うためにはという「基本のキ」の部分を改めて発表してくれました。


3班は「Bluetooth speakerとIHヒーター」。Bluetooth(ブルートゥース)とは数メートルの近距離を無線で通信する規格のことで、主にパソコンのマウスやキーボードなどの「近い距離(数センチから数メートル)での無線通信」に利用されています。親機となる機器と子機となる機器がどちらもBluetoothに対応していれば、無線で接続することができます。すでに皆様にもおなじみですよね。IHとは電磁誘導加熱(Induction Heating)、つまり電磁調理器を意味し、 電流を流した「コイル」から発生する「磁力線」が、ヒーター面(トッププレート)に密着した鍋を通る際に「うず電流」となり、鍋そのものを発熱させるしくみです。「我が家はアイエイチ」など、すでに日常会話でもよくつかわれていますよね。発表では電気工学に馴染みのない一般の方々が聞いてもわかりやすい説明を心掛けてくれました。


4班は「ESP32ラジコンカー」。ESP32シリーズは Wi-FiとBluetoothを内蔵する低コスト、低消費電力なSoCのマイクロコントローラです。 ESP32は、上海に拠点を置くEspressif Systemsが開発し、TSMCの40nm工程で製造されています。使用した初心者向けのマイコンボード、Arduinoについても詳細な説明がありました。実際のラジコンカーを掲載してあります。当日はどりか一番カッコいいか人気投票も行いました。
5班は「電動力ブランコとリニアモーターバー」。我々もはるか昔に物理で学習したフレミング左手の法則(磁界・力・電流)を活用して、電動力を駆使したブランコとリニアモーターで動くバー(棒)を作りました。


6班は「直流モーター」。直流(Direct Current, DC)とは、時間によって大きさが変化しても流れる方向(正負)が変化しない「直流電流」のことです。5班同様、フレミング左手の法則を活用して作った直流モーターの試作品も見せてくれました。実際うまく回らなかったようですが、取り組む姿勢は評価できるものでした。

7班は「3連ハブダイナモ発電機の研究」。ハブダイナモとは、ハブに内蔵されたダイナモ(発電機)のことでハブとは車輪の中心にある回転部分で、自転車では最も重要なパーツです。それらを使って作った自転車の試作品も登場しました。
8班は「アンプ回路とスピーカーボックスの製作~Bluetoothで音楽を聴こう~」。最近よく高校生でもBluetoothを使って音楽を鑑賞しているのを目にします。アンプは、アンプリファイヤ(amplifier)の短縮形であり、漢字表現では増幅器、電圧や電流の波で表現されることが一般的な信号を増幅するもののことです。その回路とスピーカーボックスの製作を行いました。

以上です。どの研究発表も一生懸命1年間をかけて学習した成果が伝わってきました。
27日(木)に情報システム科、ロボット工学科、建築デザイン科が発表会を行います。
★課題研究発表会2(都市基盤工学科3年)★
投稿日時 : 2022/01/25
総務課
先週の機械工学科に続いて、1月25日(火)には都市基盤工学科、電気工学科で3年生の課題研究発表会がありました。まずは、都市基盤工学科の課題研究発表会の様子をお知らせします。
1班は「静岡GO」。昨年7月に熱海市で発生した土砂災害などの例を取り上げながら、「静岡県に発生した自然災害」を取り上げて、その被害状況や原因分析等を行いました。この発表は昨年12月に本校の防災訓練でも全校生徒で視聴し、みんなで災害の様子や防災への取り組みについて話し合う教材にさせていただきました。久能算東照宮に出向き現地視察をした時の様子も披露してくれました。

2班は「ウーブンシティ・未来の都市づくり」。ウーブン・シティとは裾野市に建設中の実験都市のことで、東日本大震災後に東北地方での事業を拡大したトヨタ自動車東日本が、2020年年末に東富士工場の閉鎖を決定、その跡地にて、トヨタ自動車が建設予定の実証都市で2021年2月23日着工されました。先日の裾野市長選でも選挙の争点となった関心事項、都市基盤工学の視点で未来の都市づくりについて研究しました。市長選でも市民の声として上がっていましたが、ウーブンシティについてはなかなか情報が出てきていなくて、裾野市の都市未来計画の土木面での発表をもとに研究を進めました。ウーブンとはwoven とはweave(織る)の過去分詞系形容詞、主体となっているトヨタ自動車のルーツとなる豊田自動織機から来ています。

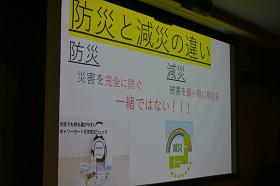
3班は「防災と減災、何が違うの?」。コロナでも「ゼロコロナ」か「ウィズコロナ」、とちらを目指すべきかわかれるところですが、防災か減災か、こちらも果てしない永遠のテーマであります。免震と耐震の模型を作って研究を進めました。今は「被害を最小限に防ぐ」減災の考えが広まってきていて、静岡県にも大きな爪あとを残した昭和49年の七夕豪雨の被害についても話が及びました。


4班は「ローテク技術を磨く」。ローテク(low-tec)あるいはロー・テクノロジー(low-technology)とは、ハイテク(high-technology)の対義語であり、「最先端のものではない科学技術」や「シンプルで、洗練されていないテクノロジー」を意味します。一年間を通して木材を使いち治具(じぐ)などを作ることで機械の使い方を学びました。バイクのボディやポール部分の製作をした時の苦労話は印象的でした。なお、バイクはボディやフレーム部分の製作を行い、エンジン等動力面には生徒は関わっておりませんのでご承知おきください。

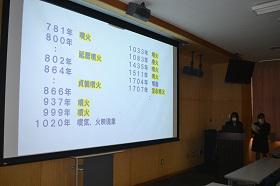
5班は「富士山は噴火する?」。これもどなたも子供のころから聞いたことのある話題で、現在のところ答えの出ないテーマでもあります。富士山噴火の歴史の中で最後の大噴火は、宝永四年(1707年)、旧暦の11月23日、今から約315年前のことです。最近富士山の噴火ハザードマップが改訂されたことを機会に富士山の噴火の歴史や万が一噴火した時の対策、被害想定を研究しました。


6班は「まちの魅力を伝えるために~Shizu photo~」。皆さんはフォトロゲイニングという言葉を聞いたことがありますか。フォトロゲイニング(Photo rogaining)とは、地図上にあらかじめ設定されたチェックポイントを制限時間内で多く巡り獲得した合計得点を競うスポーツで、チェックポイント通過の証明に目印を撮影した写真を用います。略称はフォトロゲ、オーストラリア発祥のアウトドアスポーツであるロゲイニングをアレンジしたもので2005年に日本で始まりました。そのフォトロゲイニング競技大会を作ろうと思ったことがきっかけで、市内のフォトスポットを自分たちで見つけて撮影を行い、その写真をもとにオリジナルのフォトロゲイニングを企画しました。静岡県のおすすめフォトスポットとして森下公園やグランシップ、八幡山などを挙げて、それらの場所全部で49箇所で撮影した写真も見せてくれました。
7班は「ミニチュア作戦~谷津山地層、蓬莱橋、テトラポッド」。本校北側にそびえる谷津山、実際に散策して土を採取して地層を作り、さらには本校の住所となっている「長沼」の由来も研究、さらには島田にある世界最長の木造歩道橋・蓬莱橋のミニチュア1/100スケールの木材加工をつくり、本校の文化祭でも販売したテトラポッドの消波ブロックの製作も行い、まさにミニチュア模型をたくさん作った「ミニチュア大作戦」となりました。写真の通り、ジオラマの現物は圧巻でした。


以上です。
26日(水)に建築デザイン科、27日(木)に情報システム科、ロボット工学科、建築デザイン科が発表会を行います。
