
Home | 連絡先・所在地・アクセス | リンク

★課題研究発表会4(ロボット工学科3年生)★
投稿日時 : 2022/01/27
 総務課
総務課
1月27日(木)にはロボット工学科、建築デザイン科、情報システム科で3年生の課題研究発表会がありました。まずは、ロボット工学科の課題研究発表会の様子をお知らせします。
ロボット工学科は平成24年度の学科改編で「制御工学科」から「ロボット工学科」に変わって、今回の卒業生が第8期生となります。
1班は「自動ごみ箱の製作」。赤外線距離センサーを使い、人が近づくと信号が反応しサブモーターが稼働、ふたが開き、ごみを入れるとフォトトランジスタ・赤外線ダイオードが光軸に触れて反応、ふたが閉まるという高度な仕組みのものです。
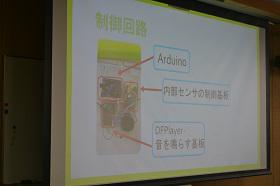
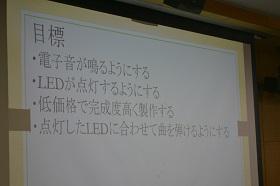
2班は「Arduinoによる電子ピアノ制御」。Arduino(アルドゥイーノ)とは、(ハードウェアの)「Arduinoボード」、および(ソフトウェアの)「Arduino IDE」から構成されるシステムです。アニメ「エバンゲリオン」のテーマ曲「残酷な天使のテーゼ」のリズムに合わせてLEDを光らせて、その光った鍵盤を押していくと曲が演奏できるというハイテクな仕組みです。

3班は「潜水艦・水中ドローン製作」。タイトルを見て驚いた方もいると思いますが、ドローンと言えば空を飛ぶものが一般的ですが、実際に水中ドローンというものがあるのを知った生徒たちはその動作原理に興味を持って実際作ってみようと思った研究です。スクリューやギアボックスを3Dプリンターで出力してみたものの、熱で形がゆがんだり、0.1mmまでの精度がないため、3Dプリンターは大きい物や精度を要するものには使わない方がいいと気付いたことは収穫だったと思います。

4班は「エレベーター自動ドアの製作」。実用化されているものを再現してみたい、実習で学んだ知識を生かしたい、という飽くなき探求心から研究を始めたそうです。自動ドアの機構(機械の構造)製作に時間がかかったそうです。自動ドアの仕組みにバネを用いているのも特色です。
5班は「自動運搬流通システムの研究」。工場の自動化(Factory Automation)が進み、各企業もロボットの開発に力を入れる昨今、その新規ロボット開発がいかに大変なのかを知りたいと思ったきっかけで研究を始めたそうです。自動運搬車やアームロボット、ベルトコンベアの製作を通じてその苦労を実感し、作ったロボットをロボット大会に出場させたそうです。運搬→流通、という一連の動きの自動化で自動運搬流通システムを高度に再現しています。


6班は「遊星歯車機構を用いたコーヒーカップの製作」。遊星歯車機構( planetary gear mechanism)とは太陽歯車を中心として、複数の遊星歯車が自転しつつ公転する構造を持った歯車機構です。遊園地にある「コーヒーカップ」の遊具をイメージし、3DCADやレーザー加工機を使って作ってみました。よく「歯車がかみ合わない」などという表現も使いますが、内歯車と外歯車が上手くかみ合うことでその遊星歯車の上に乗せたコーヒーカップがグルグル回っていきます。宇宙の恒星(太陽)と惑星との自転・公転の原理を活用しています。製作には3DCADを活用しました。

7班は「ホバークラフトの製作」。ホバークラフト(hovercraft 別名・エアクッション艇)は、水面や地面に向けて空気を高圧で噴出し、浮揚して進む乗り物で、平坦な面であれば地上、水上、雪原の区別無く進むことができます。簡単な例えで言い換えればゲームセンターなどにある「エアホッケー」の原理だそうです。作りやすさを優先し、形を円型にして自転車のチューブを活用、その上にホバーの本体を乗せました。車体の制御にはラジコンの制御信号を送信する装置・プロポ(プロポーショナルシステム)を活用しました。

8班は「ドローンの研究」。どの科の課題研究でも定番のテーマですが、この班は小型ドローンを製作し、ピッチの角度に研究の力点を置き、角度を変えることによってドローンにどんな動作がなされるかを研究しました。


9班は「モノホイール駆動 車輪型模型の製作」。モノホイール(mono-wheel)とは一輪のタイヤに人が乗り、重心を一定に保って移動できる乗り物です。1輪のタイヤの内側にもう1輪のタイヤを入れて、内輪・外輪の間にベアリングを使って中に鉄球を入れることにより、外輪はまわって内輪はまわらない仕組みを作りだします。自動車学校でも「内輪差」「外輪差」などという言葉を習いますね。

10班は「自動販売機の製作」。外型はアルミフレームを使って作り、コインを入れてボタンを押すとベルトコンベアが稼働し、ジュースを押し出して商品が出てくる仕組みです。PLCという制御装置を活用しています。PLCとはProgrammable Logic Controllerの略で、リレー回路の代替装置として開発された制御装置です。工場などの自動機械の制御に使われるほか、エレベーター、自動ドア、ボイラー、テーマパークの各種アトラクション(遊具)など、身近な機械の制御にも使用されています。
11班は「階段昇降ロボットの製作」。当初はお掃除ロボットを製作する予定でしたが、挫折して階段昇降ロボットに変更したそうです。ステッピングモーターを活用しています。大畑君一人での研究です。
12班は「立体ゾートロープの製作」。ゾートロープとは、回転のぞき絵とも言い、静止画を素早く入れ替えることで、あたかも動いているかのように見せる器具です。円柱の内側にアニメーション、外側に隙間を作り回転させることによって動いているように見える仕組みです。曽根君一人での研究です。
13班は「無線2足歩行ロボット」。サーボモーターを3個活用し、バルス幅をいじると角度が制御され、プログラムを入力するとトワイライト無線機で信号を送り、サーボモーターが稼働、重心移動して前進していく仕組みになっています。この研究も富田君単独研究です。
14班はAIロボット。まさに「ザ・ロボット工学科」とも言える研究。AI(人工知能 Artificial Intelligence)を駆使して、声で動く自動車を製作、制御装置にはラズベリーパイを使いました。音声認識ソフトはジュリアス(Julius)、声を認識し言葉の波形を読み取ることによってそれに応じて動くプログラムを入力しました。また画像認識ソフトはパイソン(Python)を使用、プログラム言語を打ち込んで、今回はじゃんけんの「グー・チョキ・パー」を認識するようにプログラミングし、それぞれ違う信号を送るようにしました。

以上です。
31日(月)には物質工学科が発表会を行います。なお、理数科は2月に2年生が行います。