Home | 連絡先・所在地・アクセス | リンク

★課題研究発表会6(電子工学科3年生)★
投稿日時 : 2022/01/27
 総務課
総務課
1月27日(木)に第1~3会議室にて電子工学科の課題研究発表会が行われました。
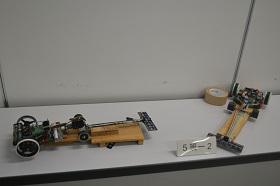
電子工学科は基本的にすべての班がロボット競技会のひとつである「マイコンカーラリー」(マイクロコンピュータを搭載したロボットがコースを自律制御で走り、タイムを競う競技会)に出品したマイコンカーの特性や性能、協議会の結果等を報告するスタイルを取っています。各班・グループがそれぞれ作ったマイコンカーの特色等明記しながら簡単にご紹介しています。
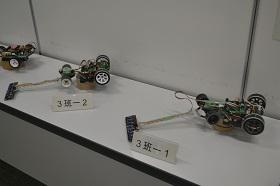
1班-1「ユウ号R」は重心が低い後輪駆動、なるべく速度を落とさずにカーブやクランクを曲がるようにプログラムを組みました。シリコンテープで脱輪を防ぐなどの工夫が施されました。
2「ガッキー2号」は重量626gの後輪駆動、低重心で安定感が増していました。スーパーシリコンを付けたことも特徴です。結果、東海大会で3位の成績を収めました。もう一台の「チャリオット」は東海大会2位、全国大会出場権を獲得しました。残念ながらコロナの影響で全国大会は中止となってしまいました。

2班は車体名「α」と「202」。αは東海大会5位、202は12位の成績を収めました。ミニマイコンカーとはセンサーの数(ミニは4、マイコンカーは8)やサーボの有無などが変わってきます。この班の発表は下級生にもより分かりやすくをモットーに車体の作り方マニュアルや組み立て時の創意工夫、プログラムについての概略、そして留意点や後輩に伝えたいことを丁寧に網羅していたことが印象に残りました。

3班の発表は他の班と違い、マイコンカーラリーの概略、部門・コースについて、ルールの説明、コースレイアウト、PWM周期の説明、カーブ最適化・センサ感度による変化・クランク安定化の研究などを詳細に触れながら、最後にマシンの紹介と大会結果に触れていた丁寧な説明が印象に残りました。最後にコース清掃車を製作した研究発表もあり、全国大会出場は成りませんでしたが、論文発表は十分全国レベルに達していたと思っています。
4班の発表は車体名「AtsutoMark」と「しんえり」。研究テーマとして動くカメラと動かないカメラ、しきい値と読み取り距離に論点を置き、しきい値(白と黒の境目を区別する値のこと)の調整に苦労したプログラミングの話などの話を混ぜながら発表、互いに東海大会で1・2位を独占した成果も発表してくれました。

5班はホイールベースが短く、後輪駆動の「プリウス零式」と後輪駆動、全長450mmの「よく走る車」を製作した備忘録を発表、プログラミングやクランク対策、レーンチェンジへの対応、使用タイヤの選考過程などクリエイティブな発想の発表をしてくれました。



発表を見ていた電子工学科の最後の生徒たち(現二年生)も参考になったはずです。